 Search Articles
Search Articles

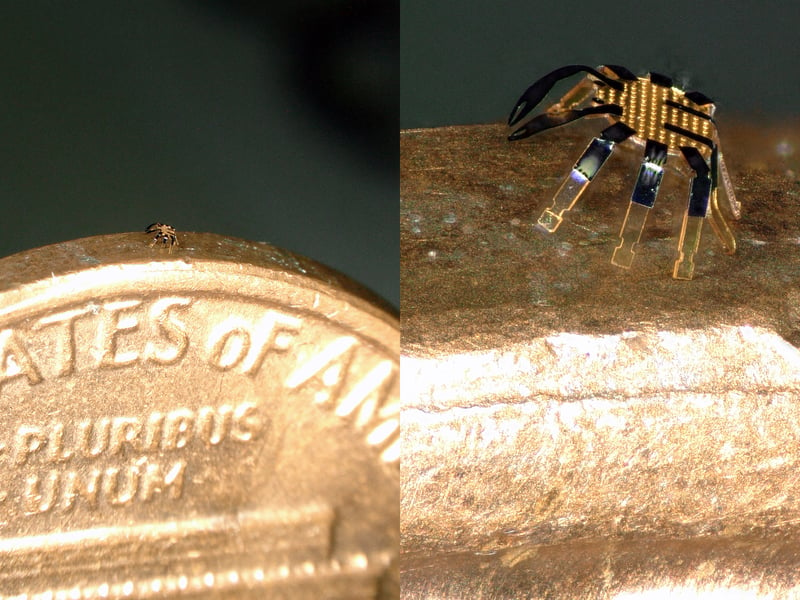
(CN) — It’s the stuff of science fiction movies — or perhaps nightmares. Engineers at Northwestern University have built the smallest-ever remote-controlled walking robots. And the current design looks like a cross between a flea and a microchip.
Actually, at half a millimeter wide, they’re roughly half the size of fleas. And they can be designed to look like any number of tiny creatures, including crickets, beetles and earthworms. The one in the picture above is designed to resemble a peekytoe crab, and can walk side-to-side like a crab. But different designs can move differently. Some are capable of twisting, turning even jumping.
As to its practical applications, John Rogers, a professor at Northwestern who led the team of engineers, was quick to assure readers that the robo-fleas are just an experiment.
“These specific robots aren’t designed to target a specific task, or solve a problem,” he said. “It’s kind of an exploratory academic effort. We’re trying to see what’s possible — how small we can go in terms of manufactured robots.”
He said that in the future, they might have biomedical applications. Think tiny robots moving through your arteries performing minimally invasive surgery, a bit like the 1966 film “Fantastic Voyage”. Although one might well imagine tiny fleas with cameras and microphones used to spy on people, Rogers said, “We’re very far from any practical application of that sort. We’re an academic group and we’re trying to put ideas out there. It’s not DOD-ready.”
Details of the project are laid out in an article published Wednesday in the journal Science Robotics. Rogers and his team have also built a winged microchip the size of a grain of sand — the smallest-ever human-made flying structure.
The robots are controlled not by any remote controls we would recognize, but by a laser which heats up the different legs of the flea. When the flea’s legs are heated, they retract; then they extend again as they quickly cool. Move the laser left to right, say, and the robo-flea will take a step to its right, since its legs are activated one at a time.
The robots are manufactured using a method that Rogers and another Northwestern Professor, Yonggang Huang, pioneered eight years ago. It’s similar to the way Intel makes microchips, although Rogers likes to compare it to a children’s pop-up book. According to a Northwestern press release: “The team fabricated precursors to the walking crab structures in flat, planar geometries. Then, they bonded these precursors onto a slightly stretched rubber substrate. When the stretched substrate is relaxed, a controlled buckling process occurs that causes the crab to ‘pop up’ into precisely defined three-dimensional forms.”
In other words: a pattern is printed onto a piece of stretched rubber. As the stretched rubber relaxes, it pops up in a certain three-dimensional shape.
 Follow @hillelaron
Follow @hillelaronSubscribe to our free newsletters
Our weekly newsletter Closing Arguments offers the latest about ongoing trials, major litigation and rulings in courthouses around the U.S. and the world, while the monthly Under the Lights dishes the legal dirt from Hollywood, sports, Big Tech and the arts.