 Search Articles
Search Articles

(CN) – Moths tend to zig when we think they’re going to zag. To the naked eye the navigation habits of a moth can appear dizzying, but a team of researchers say these insects can help improve the flight patterns of unmanned drones.
While moths do not telegraph where they’re going, scientists wanted to record how moths solve the problem of navigation. Researchers mounted moths with equipment and let them play “video games” in a study published Thursday in the journal PLOS Computational Biology.
The results showed moths are goal-oriented insects.
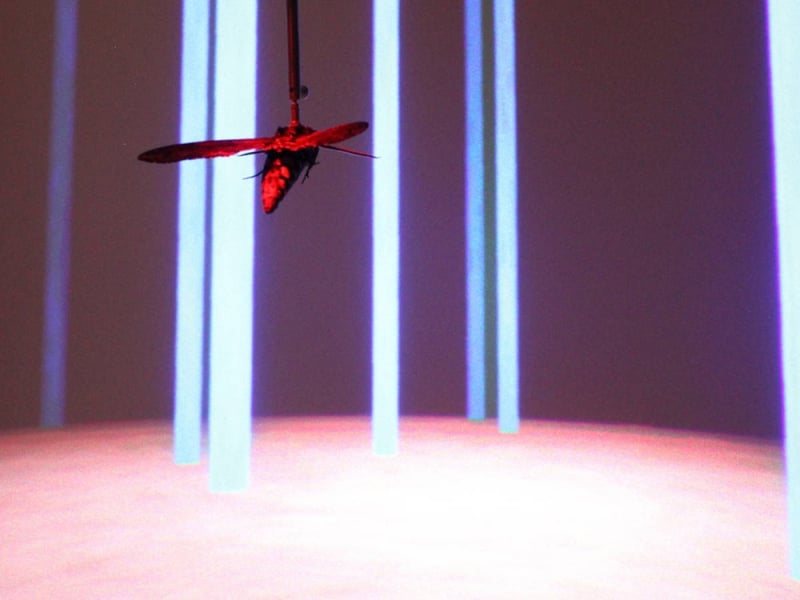
Beams of light were projected in a moving forest scene before eight hawk moths. Their flight data was analyzed and transcribed into a program that could be used for a drone, but that would mimic a moth’s decision-making process.
Depending on how far ahead they can see, a moth will plan its route. Over the course of randomized trajectories via resampling, results suggest moths respond to external stimuli and follow a path that is deliberate or planned.
This type of information can prove useful for autonomous vehicles that require navigating complex routes and avoiding collisions.
Currently, programming for autonomous vehicles relies on dynamic programming techniques, but the study authors say the curse of dimensionality can present a vehicle too many “states” or variables to navigate while presenting a plethora of dimensions to consider as it moves from point A to point B.
On the other hand, machine learning can also be modeled after the individual actions of an expert who performs a certain task for a program to copy. This is suitable for moving a vehicle in what scientists might call a low-level task, but moths are concerned with moving through dense forests and the study shows that’s how they’ve adapted to the world.
Electrical and computer engineering professor Ioannis Paschalidis with Boston University, a study co-author, says the most surprising finding that came out of the study was learning how robust a moth’s policy or strategy can become across a relatively large range of forest densities.
“Specifically, although we can ‘beat’ the moth policy in any given forest, it proved to be close to our best policy across a large range of forests (with a varying degree of tree density),” Paschalidis said in an email.
This study was part of the Neuro-Autonomy Project that includes collaborative work with Boston University, Massachusetts Institute of Technology, the University of Melbourne and other institutions developing next-generation autonomous vehicles that can learn on-the-fly.
Study authors also included biology professor Thomas Daniel from the University of Washington.
Researchers say they’re not interested in simply learning the control policy used by animals in each terrain, but instead want to obtain more information about what they call a bio-inspired model that would allow them to “learn specific parameters corresponding to the observations at our disposal,” writes the scientists.
“We also want to develop a method that would allow us to adapt these parameters to fit an autonomous vehicle operating in a different terrain, thereby obtaining a bio-inspired policy instead of a policy that merely mimics the observed animal.”
Researchers say when this programming was applied to drones, their flight programs performed 60% better in the simulated light forests because they were able to use information about the exact location of objects in their immediate area. Drones folded in their moth-lessons for their decision making.
Subscribe to our free newsletters
Our weekly newsletter Closing Arguments offers the latest about ongoing trials, major litigation and rulings in courthouses around the U.S. and the world, while the monthly Under the Lights dishes the legal dirt from Hollywood, sports, Big Tech and the arts.